永井 忠一 2019.7.28
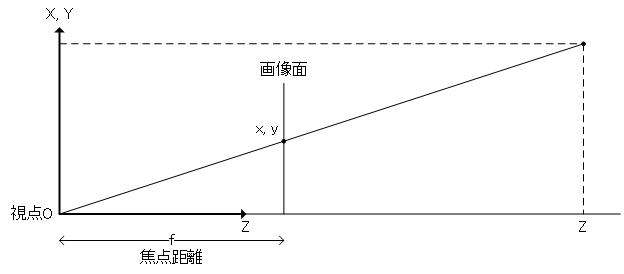
ピンホールカメラの式。fは焦点距離。(比例)\[ x = f\frac{X}{Z}, y = f\frac{Y}{Z} \]
入力はX, Y, Zの3次元。出力はx, yの2次元。(射影変換)
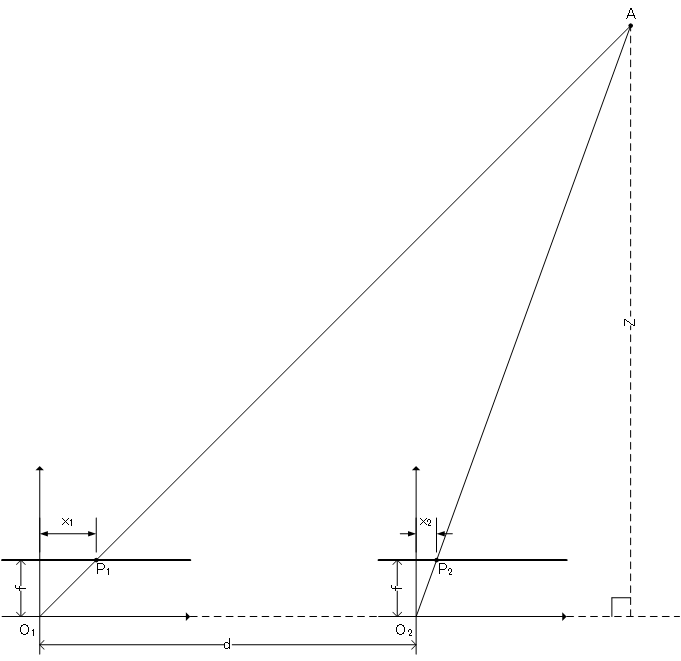
△AO1O2と△AP1P2の相似\[ \overline{O_{1}O_{2}}:\overline{P_{1}P_{2}}=Z:(Z-f) \]\[ d:(d-x_{1}+x_{2})=Z:(Z-f) \]
(比の性質)\[ d(Z-f)=Z(d-x_{1}+x_{2}) \]
(Zについて整理)\[ dZ-df=Z(d-x_{1}+x_{2}) \]\[ -df=-Zx_{1}+Zx_{2} \]\[ -df=Z(-x_{1}+x_{2}) \]\[ \therefore Z=\frac{fd}{x_{1}-x_{2}} \]
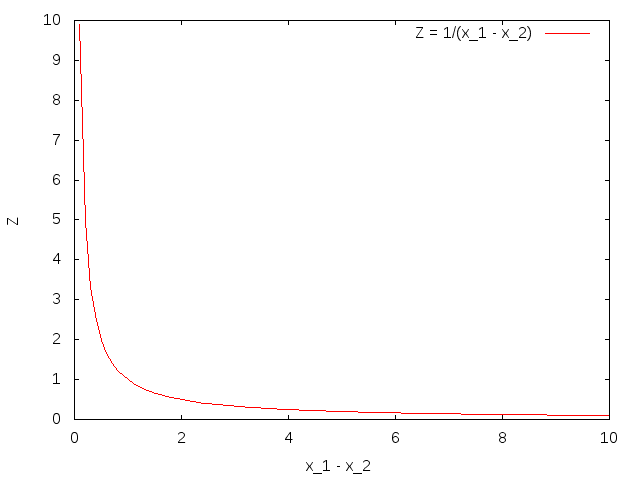
視差(disparity)と距離の関係は反比例。
座標変換(回転行列と同次座標表現)
(単位四元数を使って3次元空間の回転を表す)
回転軸\[ \mathbf{n}=\left( \begin{array}{c} n_1 \\ n_2 \\ n_3 \end{array} \right) \]ただしnは単位ベクトル
回転角θ\[ \dot{q}=\cos{\frac{\theta}{2}}+\sin{\frac{\theta}{2}n_1}i+\sin{\frac{\theta}{2}n_2}j+\sin{\frac{\theta}{2}n_3}k=\left( \begin{array}{c} \cos{\frac{\theta}{2}} \\ \sin{\frac{\theta}{2}n_1} \\ \sin{\frac{\theta}{2}n_2} \\ \sin{\frac{\theta}{2}n_3} \end{array} \right) \]
点(x, y, z) \[ \mathbf{\dot{r}}=xi+yj+zk=\left( \begin{array}{c} 0 \\ x \\ y \\ z \end{array} \right) \]\(\mathbf{\dot{r}}\)は純虚
回転\[ \dot{q}\mathbf{\dot{r}}\dot{q}^{*}=\left( \begin{array}{c} \cos{\frac{\theta}{2}} \\ \sin{\frac{\theta}{2}n_1} \\ \sin{\frac{\theta}{2}n_2} \\ \sin{\frac{\theta}{2}n_3} \end{array} \right) \left( \begin{array}{c} 0 \\ x \\ y \\ z \end{array} \right) \left( \begin{array}{c} \cos{\frac{\theta}{2}} \\ -\sin{\frac{\theta}{2}n_1} \\ -\sin{\frac{\theta}{2}n_2} \\ -\sin{\frac{\theta}{2}n_3} \end{array} \right) \]\( \dot{q}^{*} \)は共役クォータニオン
Z軸まわりに60度回転する四元数\[ \cos{\frac{60^\circ}{2}}+\sin{\frac{60^\circ}{2}}\times{0}i+\sin{\frac{60^\circ}{2}}\times0j+\sin{\frac{60^\circ}{2}}\times1k\\=\frac{\sqrt{3}}{2}+\frac{1}{2}k \]
(1, 0, 0)を上記の四元数で回転させる
| \[ (\frac{\sqrt 3}{2}+\frac{1}{2}k)i(\frac{\sqrt 3}{2}-\frac{1}{2}k) \] | |
| \[ =(\frac{\sqrt 3}{2}+\frac{1}{2}k)(\frac{\sqrt 3}{2}i-\frac{1}{2}ik) \] | 虚数単位と虚数単位が掛かってik=-j |
| \[ =\frac{\sqrt 3}{2}\frac{\sqrt 3}{2}i+\frac{\sqrt 3}{2}\frac{1}{2}j+\frac{1}{2}\frac{\sqrt 3}{2}ki+\frac{1}{2}\frac{1}{2}kj \] | 虚数単位と虚数単位が掛かってki=j, kj=-i |
| \[ =(\frac{\sqrt 3}{2}\frac{\sqrt 3}{2}-\frac{1}{2}\frac{1}{2})i+(\frac{\sqrt 3}{2}\frac{1}{2}+\frac{1}{2}\frac{\sqrt 3}{2})j \] | |
| \[ =\frac{1}{2}i+\frac{\sqrt 3}{2}j \] |
| Linux |
|---|
|
|
| Octave | Wolfram |
|---|---|
|
|
(回転を表すのはノルムが1の単位四元数)
| Octave | Wolfram |
|---|---|
|
|
畳み込み\[ B={A}\otimes{h} \]
hというフィルタをかける(画像では非対称なフィルタは使わない)
平滑化(ローパスフィルタ)
2次元ガウス分布(Gaussian)
|
|
| C/C++ |
|---|
|
| Python |
|
エッジ検出(ハイパス)
1次微分。x軸方向
|
|
|
y軸方向
|
|
|
勾配の大きさ\[ \sqrt{A_{x}^{2}+A_{y}^{2}} \]
平滑化(重み付き)と微分の組み合わせ
|
|
変化のピークは0交差
|
|
2次微分の横方向と縦方向を合わせたもの
| 0 | 1 | 0 |
| 1 | -4 | 1 |
| 0 | 1 | 0 |
平滑化と2次微分の組み合わせ
「Filters」メニュー → 「Generic」 → 「Convolution Matrix...」

2次元FFTについて《積み残し》
《積み残し》
直線の検出について《積み残し》
《積み残し》
《積み残し》
《積み残し》
\[ R_{SAD}=\sum_{j=1}^{N}\sum_{i=1}^{M}|I(i,j)-T(i,j)| \]
| C/C++ | Python |
|---|---|
|
|
\[ R_{SSD}=\sum_{j=1}^{N}\sum_{i=1}^{M}(I(i,j)-T(i,j))^2 \]
| Python |
|---|
|
\[ R_{NCC}=\frac{\sum_{j=1}^{N}\sum_{i=1}^{M}I(i,j)T(i,j)}{\sqrt{\sum_{j=1}^{N}\sum_{i=1}^{M}I(i,j)^{2}\sum_{j=1}^{N}\sum_{i=1}^{M}T(i,j)^{2}}} \]
|
内積をとってそれぞれのノルムで割っている(cos θを見ている)
画像の明るさが(数値として見ると大きく)影響するので、画像のウインドウ内の平均が0になるように正規化(平均で引く)する(Zero-mean)
線上を探索。同じところは同じように(同じ色に)見えているはず
同じところだと判断できるのは模様のある(画素の値が変化している)ところだけ
もともとの領域とは関係のない小領域を作るので、エッジが鈍る
各画素について、対応する画素はたかだか1つ(up to 1)存在する(一意性)
立方体を投影
(陰線処理はハードコーディングによる)
(x, y)が何ピクセル目に映っているかは、ピクセルの大きさΔdで割る。(デジタル化)\[ x'=x/\Delta d+O_x \\ y'=y/\Delta d+O_y \](x', y':何ピクセル目か)
(Ox, Oy)を足す。画像座標系は左上が原点(カメラ座標系は投影中心が原点)
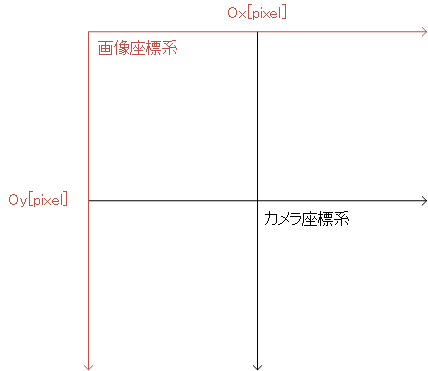
単位は、(x', y')は[pixel]。(x, y)は[m]、Δdは[m/pixel]、(Ox, Oy)は[pixel]
Sx, Sy:ピクセルの大きさの逆数(x方向とy方向で微妙に画素の大きさが違うことがあるので分けている)\[ \left( \begin{array}{c} x' \\ y' \\ 1 \end{array} \right)=\left( \begin{array}{ccc} S_x & S_\theta & O_x \\ 0 & S_y & O_y \\ 0 & 0 & 1 \end{array} \right)\left( \begin{array}{c} x \\ y \\ 1 \end{array} \right) \]
Sθは(0でもよいが)小さい数。(加工の精度の問題による)画像面の傾きを補正(ノウハウ的)
ピンホールカメラモデル。(カメラ座標系で)4次元のベクトル(X Y Z 1)Tを(x y 1)Tに変換する\[ \left( \begin{array}{c} x \\ y \\ 1 \end{array} \right)=\frac{1}{Z}\left( \begin{array}{cccc} f & 0 & 0 & 0 \\ 0 & f & 0 & 0 \\ 0 & 0 & 1 & 0 \end{array} \right)\left( \begin{array}{c} X \\ Y \\ Z \\ 1 \end{array} \right) \]
カメラの内部パラメタ(積にしたものが使われる)\[ \left( \begin{array}{ccc} S_x & S_\theta & O_x \\ 0 & S_y & O_y \\ 0 & 0 & 1 \end{array} \right)\left( \begin{array}{cccc} f & 0 & 0 & 0 \\ 0 & f & 0 & 0 \\ 0 & 0 & 1 & 0 \end{array} \right)=\left( \begin{array}{cccc} S_{x}f & S_\theta & O_x & 0 \\ 0 & S_{y}f & O_y & 0 \\ 0 & 0 & 1 & 0 \end{array} \right) \](よくKと書かれる)\[ K=\left( \begin{array}{ccc} S_{x}f & S_\theta & O_x \\ 0 & S_{y}f & O_y \\ 0 & 0 & 1 \end{array} \right) \]
Sxf, Syf:画素の大きさの逆数と焦点距離の積にしか意味がない(分離できない)
λはスケールファクターと呼ばれる\[ \left( \begin{array}{c} x' \\ y' \\ 1 \end{array} \right)=\frac{1}{Z}\left( \begin{array}{cccc} S_{x}f & S_\theta & O_x & 0 \\ 0 & S_{y}f & O_y & 0 \\ 0 & 0 & 1 & 0 \end{array} \right)\left( \begin{array}{c} X \\ Y \\ Z \\ 1 \end{array} \right) \]左辺は画像座標系で右辺はカメラ座標系なので、形式的にZは(紛らわしいので)使わない\[ \lambda\left( \begin{array}{c} x' \\ y' \\ 1 \end{array} \right)=\left( \begin{array}{cccc} S_{x}f & S_\theta & O_x & 0 \\ 0 & S_{y}f & O_y & 0 \\ 0 & 0 & 1 & 0 \end{array} \right)\left( \begin{array}{c} X \\ Y \\ Z \\ 1 \end{array} \right) \]
半径方向歪(や円周方向歪)について《積み残し》
剛体変換\[ \left( \begin{array}{c} X \\ Y \\ Z \\ 1 \end{array} \right)=\left( \begin{array}{cccc} R_{11} & R_{12} & R_{13} & t_x \\ R_{21} & R_{22} & R_{23} & t_y \\ R_{31} & R_{32} & R_{33} & t_z \\ 0 & 0 & 0 & 1 \end{array} \right)\left( \begin{array}{c} X_W \\ Y_W \\ Z_W \\ 1 \end{array} \right) \]
カメラの内部パラメタと外部パラメタを、線形変換で重ねる\[ \lambda\left( \begin{array}{c} x' \\ y' \\ 1 \end{array} \right)=\left( \begin{array}{cccc} S_{x}f & S_\theta & O_x & 0 \\ 0 & S_{y}f & O_y & 0 \\ 0 & 0 & 1 & 0 \end{array} \right)\left( \begin{array}{cccc} R_{11} & R_{12} & R_{13} & t_x \\ R_{21} & R_{22} & R_{23} & t_y \\ R_{31} & R_{32} & R_{33} & t_z \\ 0 & 0 & 0 & 1 \end{array} \right)\left( \begin{array}{c} X_W \\ Y_W \\ Z_W \\ 1 \end{array} \right)=\left( \begin{array}{cccc} p_{11} & p_{12} & p_{13} & p_{14} \\ p_{21} & p_{22} & p_{23} & p_{24} \\ p_{31} & p_{32} & p_{33} & p_{34} \end{array} \right)\left( \begin{array}{c} X_W \\ Y_W \\ Z_W \\ 1 \end{array} \right) \]
世界座標系で表されたXW, YW, ZWが画像の何ピクセル目に映るかが分かる
射影変換行列を求める
3次元座標が既知の点が画像のどのピクセルに投影されるかを(たくさん)みることによって、射影変換行列を求める
定数倍の不定性をさけるために射影変換行列の右下(p32成分)を1とする\[ \left( \begin{array}{c} x' \\ y' \\ 1 \end{array} \right)\sim\left( \begin{array}{cccc} p_{11} & p_{12} & p_{13} & p_{14} \\ p_{21} & p_{22} & p_{23} & p_{24} \\ p_{31} & p_{32} & p_{33} & 1 \end{array} \right)\left( \begin{array}{c} X_W \\ Y_W \\ Z_W \\ 1 \end{array} \right) \](λが掛かっているが、定数倍は等しいとして求める)
(見やすいように、)世界座標系の_Wを省略して、x'をu、y'をvと書き直す\[ \left( \begin{array}{c} u \\ v \\ 1 \end{array} \right)\sim\left( \begin{array}{cccc} p_{11} & p_{12} & p_{13} & p_{14} \\ p_{21} & p_{22} & p_{23} & p_{24} \\ p_{31} & p_{32} & p_{33} & 1 \end{array} \right)\left( \begin{array}{c} X \\ Y \\ Z \\ 1 \end{array} \right) \]
ひとつひとつの式を書き下す\[ u_{i}=\frac{p_{11}X_{i}+p_{12}Y_{i}+p_{13}Z_{i}+p_{14}}{p_{31}X_{i}+p_{32}Y_{i}+p_{33}Z_{i}+1} \]\[ v_{i}=\frac{p_{21}X_{i}+p_{22}Y_{i}+p_{23}Z_{i}+p_{24}}{p_{31}X_{i}+p_{32}Y_{i}+p_{33}Z_{i}+1} \]
射影変換行列には11個未知数がある。既知の点が1つあると方程式が2本立てられるので、6点以上あれば射影変換行列が求められる
(最小二乗法で解く)
p11~p33が未知数なので、式をまとめる\[ p_{11}X_{i}+p_{12}Y_{i}+p_{13}Z_{i}+p_{14}-p_{31}X_{i}u_{i}-p_{32}Y_{i}u_{i}-p_{33}Z_{i}u_{i}=u_{i} \]\[ p_{21}X_{i}+p_{22}Y_{i}+p_{23}Z_{i}+p_{24}-p_{31}X_{i}v_{i}-p_{32}Y_{i}v_{i}-p_{33}Z_{i}v_{i}=v_{i}\]
(分数になっているが、pに関しては線形な式)\[ \left( \begin{array}{ccccccccccc} X_i & Y_i & Z_i & 1 & 0 & 0 & 0 & 0 & -X_{i}u_{i} & -Y_{i}u_{i} & -Z_{i}u_{i} \\ 0 & 0 & 0 & 0 & X_{i} & Y_i & Z_i & 1 & -X_{i}v_{i} & -Y_{i}v_{i} & -Z_{i}v_{i} \end{array} \right)\left( \begin{array}{c} p_{11} \\ p_{12} \\ p_{13} \\ p_{14} \\ p_{21} \\ p_{22} \\ p_{23} \\ p_{24} \\ p_{31} \\ p_{32} \\ p_{33} \end{array} \right)=\left( \begin{array}{c} u_i \\ v_i \end{array} \right) \]
6点以上あれば、pの各成分が\[ A\mathbf{p}=\mathbf{b}\\\mathbf{p}=(A^{T}A)^{-1}A^{T}\mathbf{b}\]として求まる。(ATA)-1ATは一般化逆行列(疑似逆行列)
(2個カメラがあったらそれぞれ同じことをやる)
ステレオカメラのpkは既知、3次元座標X, Y, Zが未知(DLTと同じ式で求めるものが違う)\[ u_{k}=\frac{{p_{k}}_{11}X+{p_{k}}_{12}Y+{p_{k}}_{13}Z+{p_{k}}_{14}}{{p_{k}}_{31}X+{p_{k}}_{32}Y+{p_{k}}_{33}Z+1} \]\[ v_{k}=\frac{{p_{k}}_{21}X+{p_{k}}_{22}Y+{p_{k}}_{23}Z+{p_{k}}_{24}}{{p_{k}}_{31}X+{p_{k}}_{32}Y+{p_{k}}_{33}Z+1} \]
X, Y, Zに対して線形にかかっている\[ ({p_{k}}_{11}-u_{k}{p_{k}}_{31})X+({p_{k}}_{12}-u_{k}{p_{k}}_{32})Y+({p_{k}}_{13}-u_{k}{p_{k}}_{33})Z=u_{k}-{p_{k}}_{14} \]\[ ({p_{k}}_{21}-v_{k}{p_{k}}_{31})X+({p_{k}}_{22}-v_{k}{p_{k}}_{32})Y+({p_{k}}_{23}-v_{k}{p_{k}}_{33})Z=v_{k}-{p_{k}}_{24} \]
3つ未知数があり、ステレオカメラで見ると(k=1とk=2の場合があるので)方程式は4本立てられる\[ \left( \begin{array}{ccc} {p_{1}}_{11}-u_{1}{p_{1}}_{31} & {p_{1}}_{12}-u_{1}{p_{1}}_{32} & {p_{1}}_{13}-u_{1}{p_{1}}_{33} \\ {p_{1}}_{21}-v_{1}{p_{1}}_{31} & {p_{1}}_{22}-v_{1}{p_{1}}_{32} & {p_{1}}_{23}-v_{1}{p_{1}}_{33} \\ {p_{2}}_{11}-u_{2}{p_{2}}_{31} & {p_{2}}_{12}-u_{2}{p_{2}}_{32} & {p_{2}}_{13}-u_{2}{p_{2}}_{33} \\ {p_{2}}_{21}-v_{2}{p_{2}}_{31} & {p_{2}}_{22}-v_{2}{p_{2}}_{32} & {p_{2}}_{23}-v_{2}{p_{2}}_{33} \end{array} \right)\left( \begin{array}{c} X \\ Y \\ Z \end{array} \right)=\left( \begin{array}{c} u_{1}-{p_{1}}_{14} \\ v_{1}-{p_{1}}_{24} \\ u_{2}-{p_{2}}_{14} \\ v_{2}-{p_{2}}_{24} \end{array} \right) \]
線形最小二乗法で求める\[ p\mathbf{x}=\mathbf{q} \\ \mathbf{x}=(p^{T}p)^{-1}p^{T}\mathbf{q}=q^{\dagger}\mathbf{q} \]
pは正方行列でないので逆行列p-1は求められない。p†はpの一般化逆行列(疑似逆行列)。数値計算で求める
|
ベクトルの内積と外積
内積\[ \left( \begin{array}{c} a \\ b \\ c \end{array} \right) \cdot \left( \begin{array}{c} x \\ y \\ z \end{array} \right) = \left( \begin{array}{c} a \\ b \\ c \end{array} \right)^\mathrm{T} \left( \begin{array}{c} x \\ y \\ z \end{array} \right) = \left( \begin{array}{ccc} a & b & c \end{array} \right) \left( \begin{array}{c} x \\ y \\ z \end{array} \right) = ax + by + cz \]
内積の性質\[ \left( \begin{array}{c} a \\ b \\ c \end{array} \right) \perp \left( \begin{array}{c} x \\ y \\ z \end{array} \right) なら0 \]
外積\[ \left( \begin{array}{c} a \\ b \\ c \end{array} \right) \times \left( \begin{array}{c} x \\ y \\ z \end{array} \right) = \left( \begin{array}{c} bz-cy \\ cx-az \\ ay-bx \end{array} \right) = \left( \begin{array}{ccc} 0 & -c & b \\ c & 0 & -a \\ -b & a & 0 \end{array} \right) \left( \begin{array}{c} x \\ y \\ z \end{array} \right) \]
外積の性質\[ \left( \begin{array}{c} a \\ b \\ c \end{array} \right) \parallel \left( \begin{array}{c} x \\ y \\ z \end{array} \right) なら0 \]
(2つのカメラの)ピンホールカメラモデル。カメラ1、2のカメラ座標系での物体の点\[ \mathbf{X}_{1}=\lambda_{1}\left( \begin{array}{c} x_1 \\ y_1 \\ f \end{array} \right), \mathbf{X}_{2}=\lambda_{2}\left(\begin{array}{c} x_{2} \\ y_{2} \\ f \end{array}\right) \]
(2つのカメラ間の)剛体変換\[ \mathbf{X}_{2} = R\mathbf{X}_{1}+\mathbf{t} \]
Essential matrixの導出
| \[ \lambda_{2}\mathbf{x}_{2}=\lambda_{1}R\mathbf{x}_{1}+\mathbf{t} \] | (奥行きλを消去したい) |
| \[ \lambda_{2}\mathbf{t}\times\mathbf{x}_{2}=\lambda_{1}\mathbf{t}\times R\mathbf{x}_{1}+\mathbf{t}\times\mathbf{t} \] | 辺々にt× |
| \[ \lambda_{2}\mathbf{t}\times\mathbf{x}_{2}=\lambda_{1}\mathbf{t}\times R\mathbf{x}_{1} \] | t×tは0 |
| \[ \lambda_{2}\mathbf{x}_{2}\cdot\mathbf{t}\times\mathbf{x}_{2}=\lambda_{1}\mathbf{x}_{2}\cdot\mathbf{t}\times R\mathbf{x}_{1} \] | 辺々にx2⋅ |
| \[ 0=\lambda_{1}\mathbf{x}_{2}\cdot\mathbf{t}\times R\mathbf{x}_{1} \] | x2⋅t×x2は0 |
| \[ \mathbf{x}_{2}\cdot\mathbf{t}\times R\mathbf{x}_{1}=0 \] | λ1を消去 |
| \[ x_{2}^{T}\mathbf{t}\times R\mathbf{x}_{1}=0 \] | 内積を行列の積で書く |
| \[ x_{2}^{T}\hat{T}Rx_{1}=0 \] | 外積を行列の積で書く |
| \[ x_{2}^{T}Ex_{1}=0 \] | \( \hat{T}R \)をE行列と置く(欲しかった式を得る) |
\( \hat{T} \)はベクトルの外積より\[ \hat{T}=\left( \begin{array}{ccc} 0 & -t_z & t_y \\ t_z & 0 & -t_x \\ -t_y & t_x & 0 \end{array} \right) \]
\[ \left( \begin{array}{ccc} a & b & 1 \end{array} \right)\left( \begin{array}{ccc} e_{11} & e_{12} & e_{13} \\ e_{21} & e_{22} & e_{23} \\ e_{31} & e_{32} & e_{33} \end{array} \right)\left( \begin{array}{c} x_2 \\ y_2 \\ 1 \end{array} \right)=0 \]\[ \left( \begin{array}{ccc} ae_{11}+be_{21}+e_{31} & ae_{12}+be_{22}+e_{32} & ae_{13}+be_{23}+e_{33} \end{array}\right)\left( \begin{array}{c} x_2 \\ y_2 \\ 1 \end{array} \right)=0 \]\[ (ae_{11}+be_{21}+e_{31})x_{2}+(ae_{12}+be_{22}+e_{32})y_{2}+ae_{13}+be_{23}+e_{33}=0 \]\[ y_{2}=-\frac{ae_{11}+be_{21}+e_{31}}{ae_{12}+be_{22}+e_{32}}x_{2}-\frac{ae_{13}+be_{23}+e_{33}}{ae_{12}+be_{22}+e_{32}} \]
F行列について《積み残し》
rectificationについて《積み残し》
(OpenCVのチュートリアル)
|
pts1は目視、手作業で決定。pts2は適当に決定

OpenCVが求めたH(射影変換行列)
|
.MPOファイルから左右の画像を取り出す(備忘録)
|
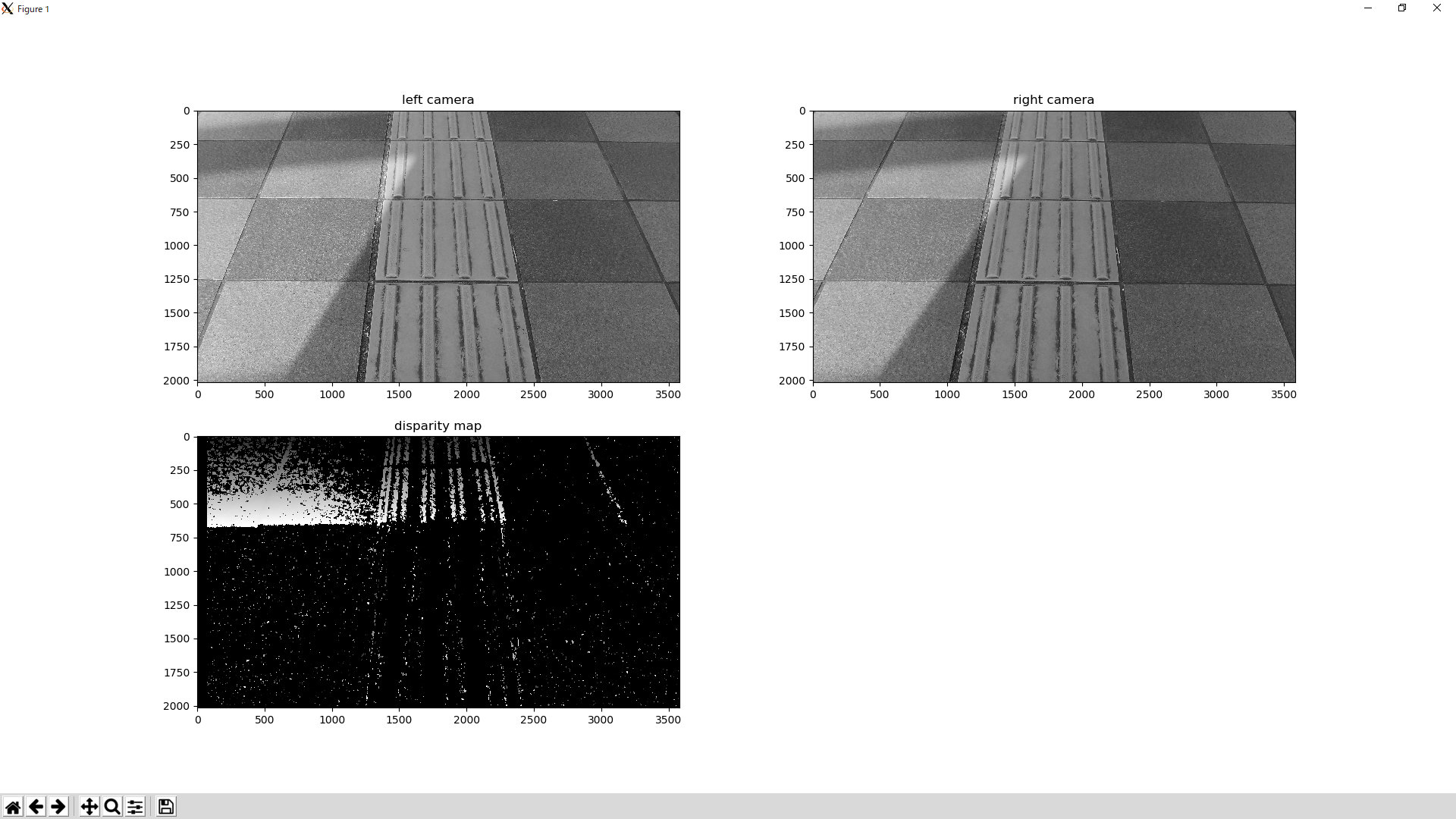
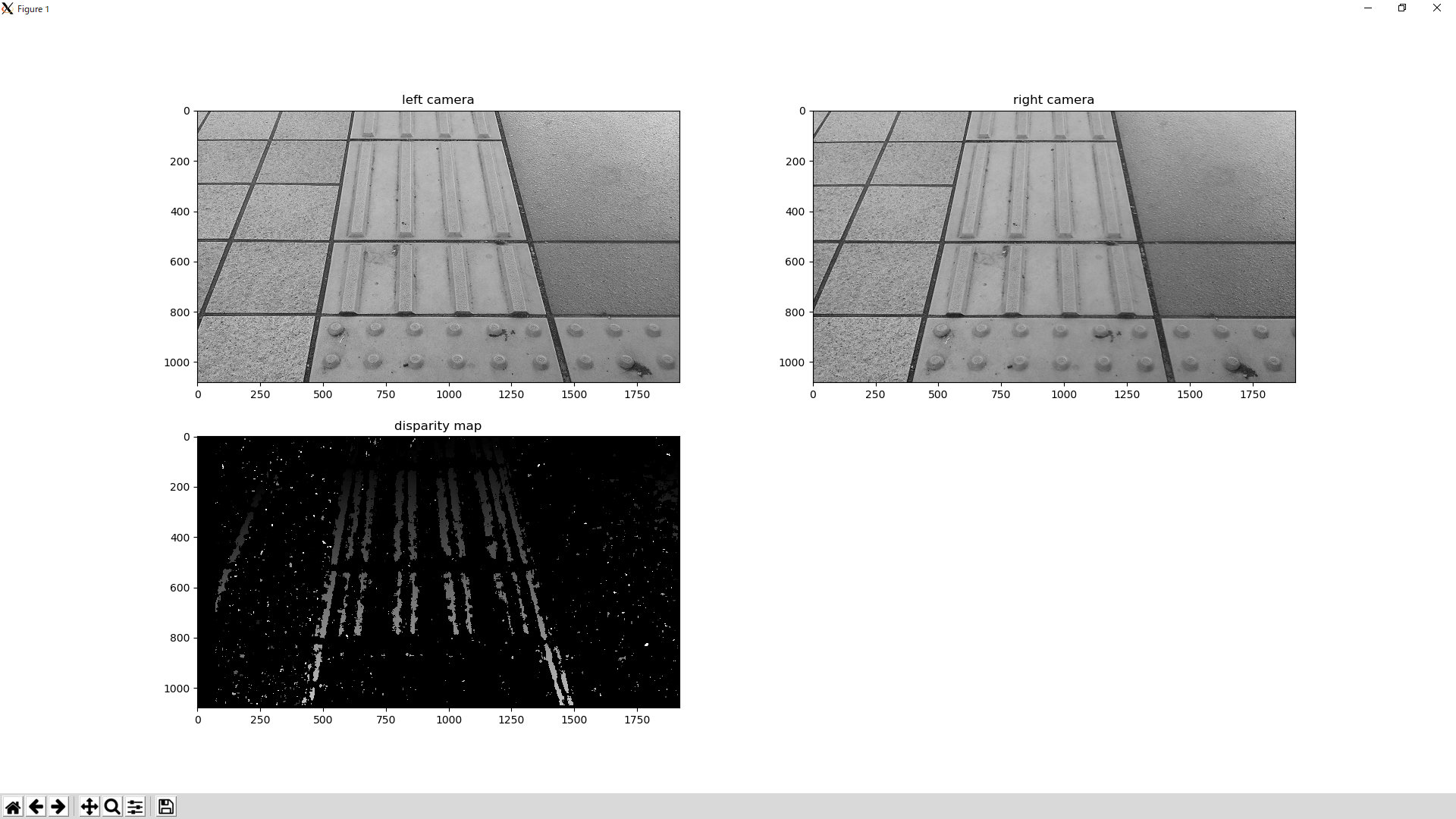
(左右は、撮影者側から見て、左カメラ、右カメラ)
(OpenCVのチュートリアル)
|
baseline length = 75mm
baseline length = 不明
背景差分(background subtraction method)、フレーム間差分(frame subtraction method)について《積み残し》
《積み残し》
粗密探索(Coarse-to-fine)アプローチについて《積み残し》
© 2019 Tadakazu Nagai